
For information about PWM in ATmega16, refer the topic PWM in ATmega16 in the ATmega inside section.
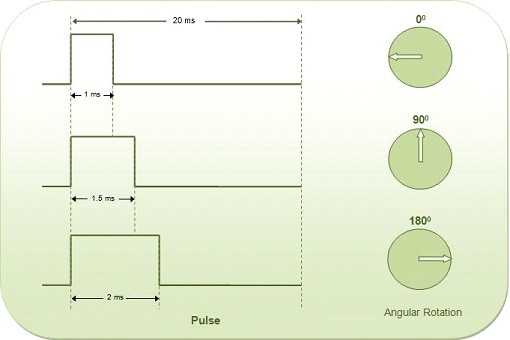
Servo Control
/* Name : main.c
* Purpose : Source code for Servo Motor interface with ATMEGA16.
* Author : Gemicates
* Date : 2017-09-07
* Website : www.gemicates.org
* Revision : None
*/
#ifndef F_CPU
#define F_CPU 8000000UL // 8 MHz clock speed
#endif
#include <avr/io.h>
#include <util/delay.h>
int main(void)
{
DDRC = 0x01; // Makes RC0 output pin
PORTC = 0x00;
while(1)
{
// Rotate Motor to -90 degree
PORTC = 0x01;
_delay_us(1000);
PORTC = 0x00;
_delay_ms(2000);
// Rotate Motor to 0 degree
PORTC = 0x01;
_delay_us(1500);
PORTC = 0x00;
_delay_ms(2000);
// Rotate Motor to +90 degree
PORTC = 0x01;
_delay_us(2000);
PORTC = 0x00;
_delay_ms(2000);
}
}